|
I am currently a senior software systems engineer with NVIDIA Automotive working on NVIDIA DRIVE that includes a full system software stack designed for self-driving cars applications that include SAE level 2 and 3, as well as automated parking functions (up to level 4). Before that, I was with Tusimple where I worked on advancing self-driving trcuks system in the capacity of staff autonomous systems engineer. And before joining TuSimple I was a senior research scientist and a software developer with Motional AD Inc for 4.7 years starting from August 2017. I worked on the development of motion planning and decision-making algorithms for autonomous robotaxi vehicles. I earned my PhD from Brigham Young University, where I was advised by Prof. Randy Beard. I worked on Airborne Collision Detection and Avoidance for Small UAS Sense and Avoid Systems. My research was sponsored by the Defense Advanced Research Projects Agency under the Small Business Technology Transfer contract through UtopiaCompression and the NSF I/UCRC program through the NSF Center for Unmanned Aircraft Systems (C-UAS). Upon finishing my PhD, I joined the Department of Mechanical and Aerospace Engineering at the University of Florida as a postdoctoral associate. I worked at UF’s remote facility, the Research Engineering Education Facility (REEF), in conjunction with the Air Force Research Laboratory (AFRL) during which I have expanded my research expertise into new areas of multi-agent navigation and localization for autonomous systems. My research interests span the broad areas of navigation, guidance and control of autonomous systems with emphasis on state estimation, localization, path planning, conflict detection and avoidance. email / C.V. / Resume / Google Scholar / LinkedIn |

|
|
|
|
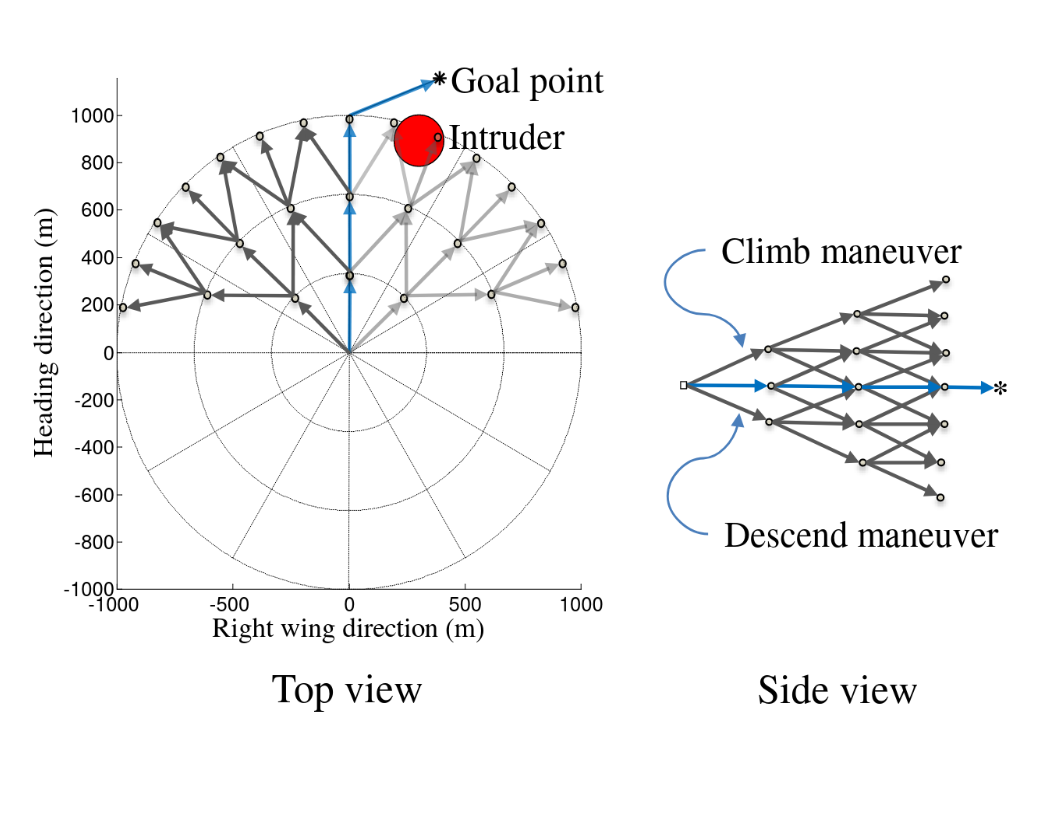
Laith R. Sahawneh, Randay W. Beard A book chapter in Kinematics, December, 2017 In this chapter, we propose a 3D path planning algorithm for small unmanned aircraft systems (UASs). We developed the path planning logic using a body fixed relative coordinate system which is the unrolled, unpitched body frame. Check this recorded Simulation: Part 1: In Local Level Frame , Part 2: In Global Frame |
|
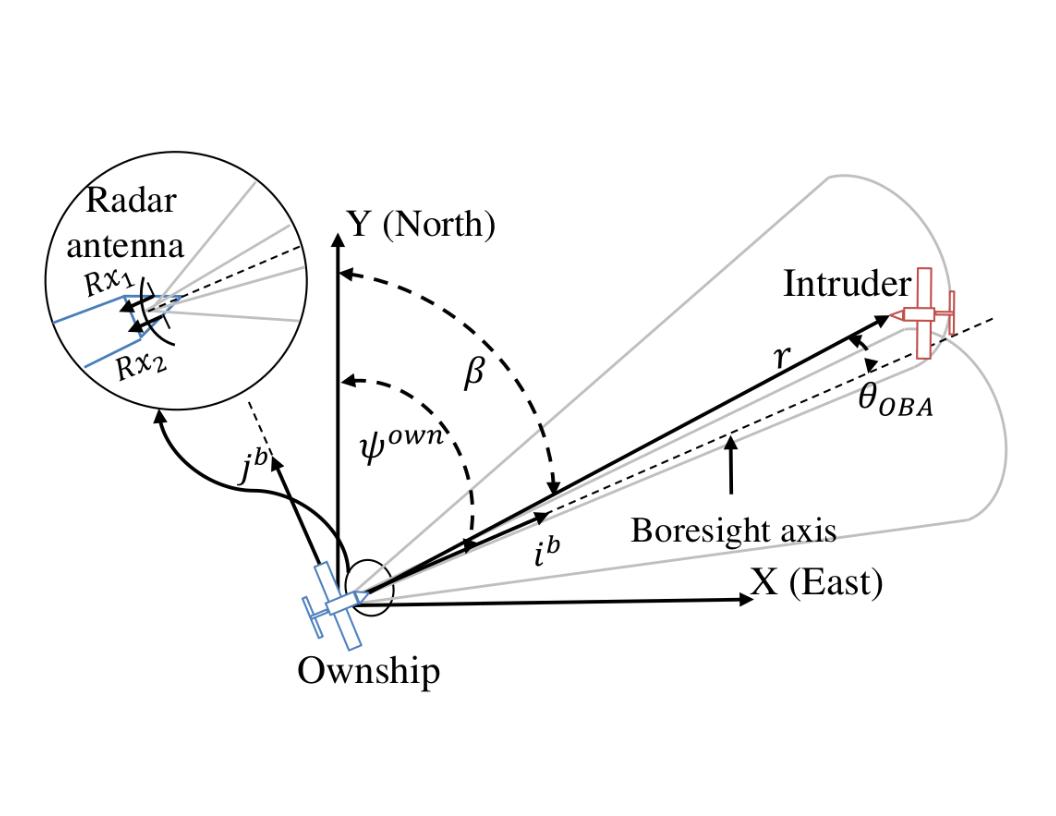
Laith R. Sahawneh, Jared Wikle, Kaleo Roberts Jonathan C. Spencer Tim McLain, Karl Warnick, Randy Beard Journal of Aerospace Information Systems (JAIS) Vol. 15 Iss. 8 Pg. 501-517 , 2018 This work demonstrates a complete end-to-end collision avoidance system where the ego drone communicates in real time with a ground-based radar sensor that detects intruders and computes safe avoidance trajectories. This work was the cumulative effort of many years of work by many, many people. Check this video! |
|
|
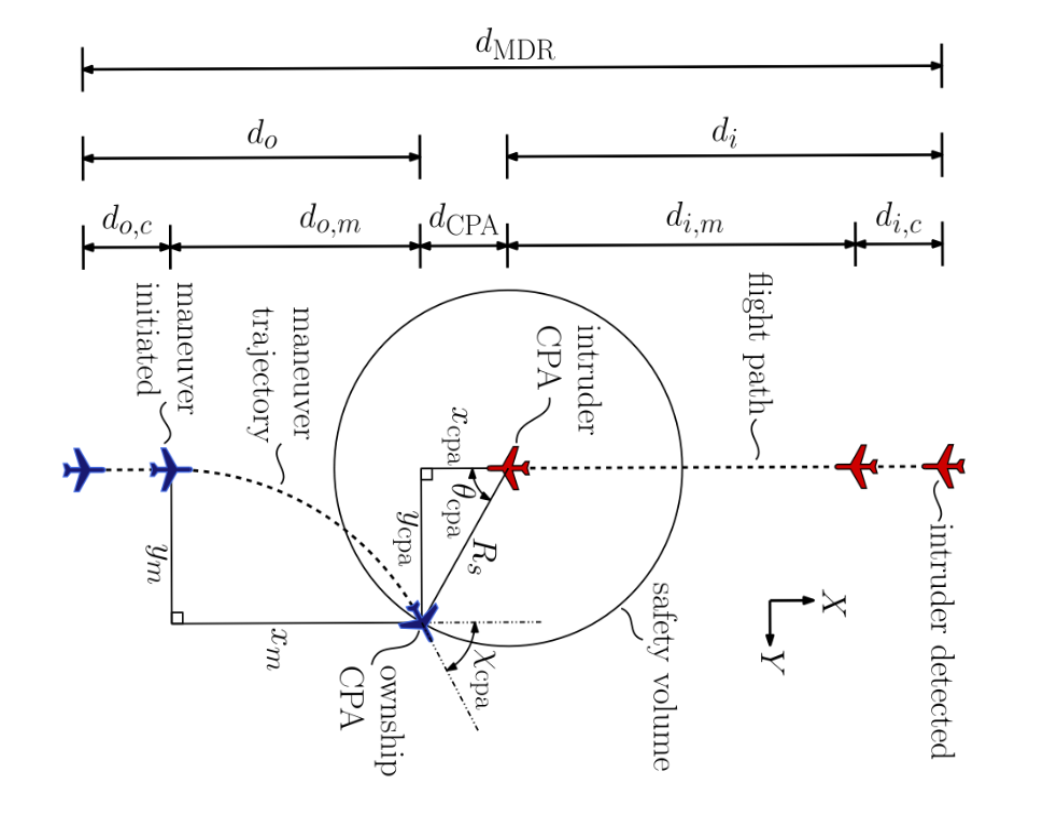
Jared Wikle, Laith R. Sahawneh, Randy Beard, Tim McLain American Institute of Aeronautics and Astronautics, Journal of Aerospace Information Systems, pp. 351-371 , June, 2017. For unmanned aircraft systems to gain full access to the National Airspace System, they must have the capability to detect and avoid other aircraft. This paper describes two analytical methods for finding the minimum detection range to ensure that these detection and avoidance steps can be carried out. |
|
In my dissertation, I worked on developing collision detection, risk assessment and avoidance framework using various sensors such camera, airborne and ground-based radars, and ADS-B that is computationally affordable and suitable to run on-board small UAS. |
|
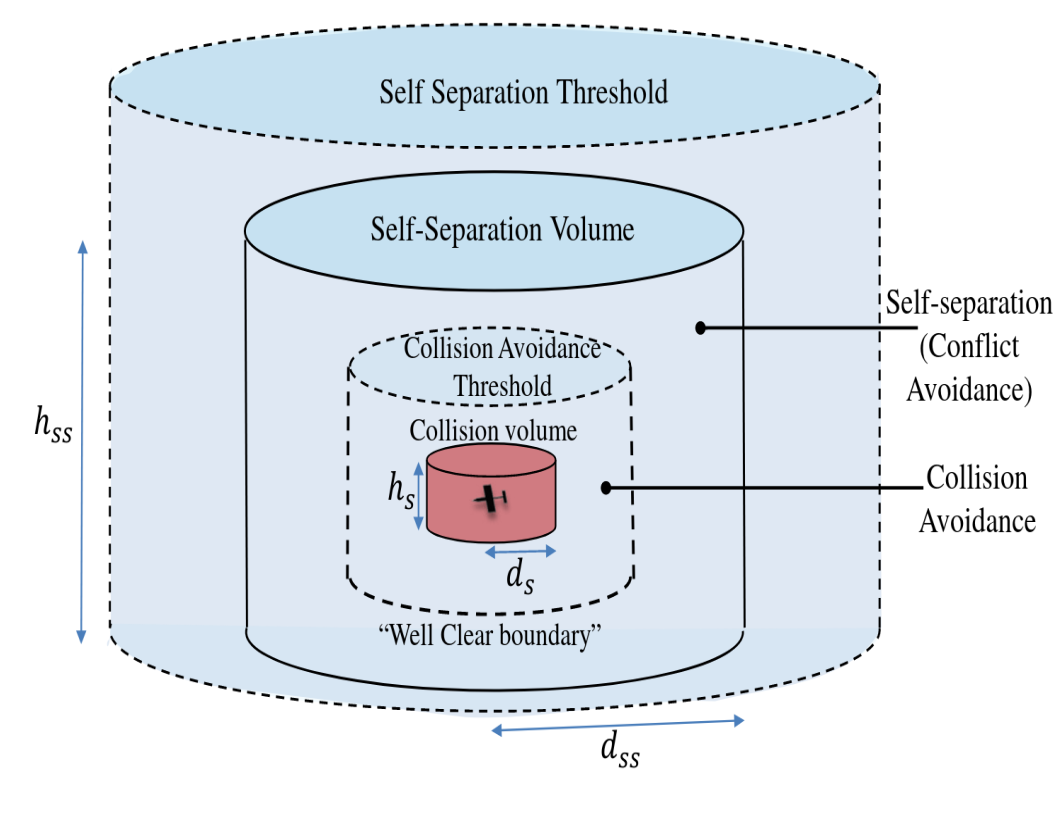
Laith R. Sahawneh, Matthew O. Duffield, Randy Beard, Tim McLain Journal of Air Traffic Control Quarterly, Vol. 23, No. 2-3, pp. 203-240 , 2015. This article presents a framework that consists of an Automatic Dependent Surveillance-Broadcast (ADS-B)-based sensor, track estimator, conflict/collision detection, and resolution that mitigates collision risk. |
|
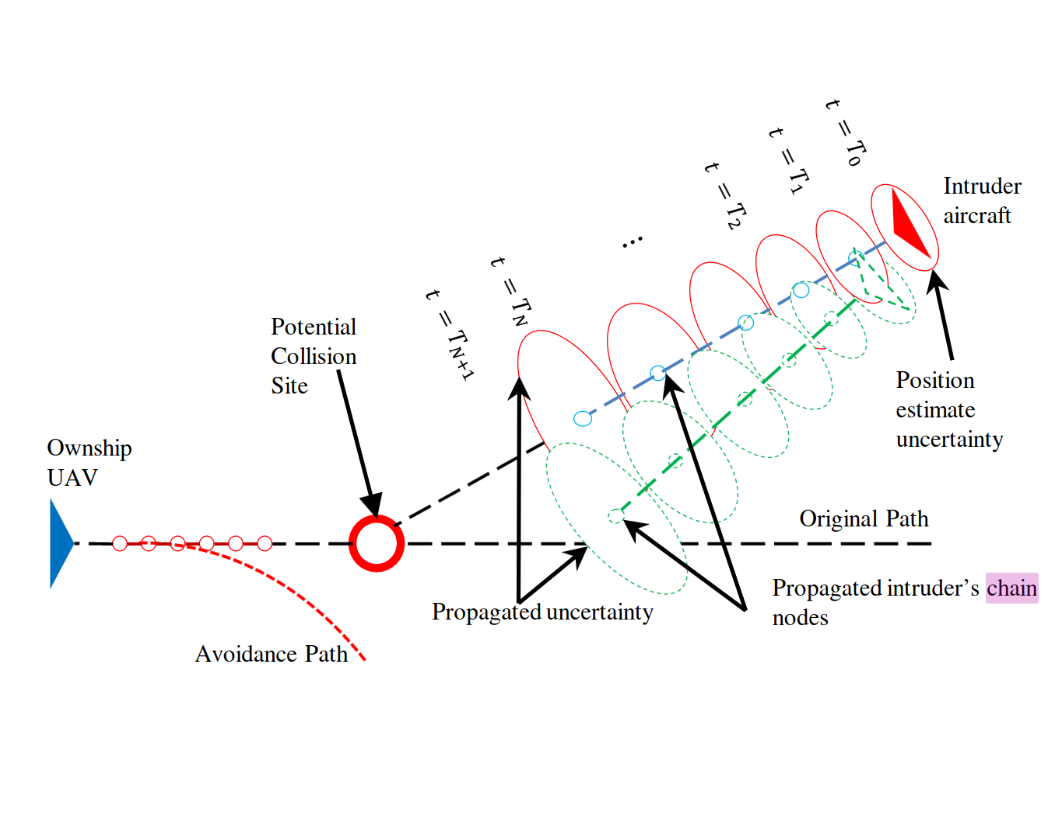
This work estimates probability of collision risk for a pair of aircraft at the same altitude using state estimates from a radar sensor and a reachable sets framework. |
|
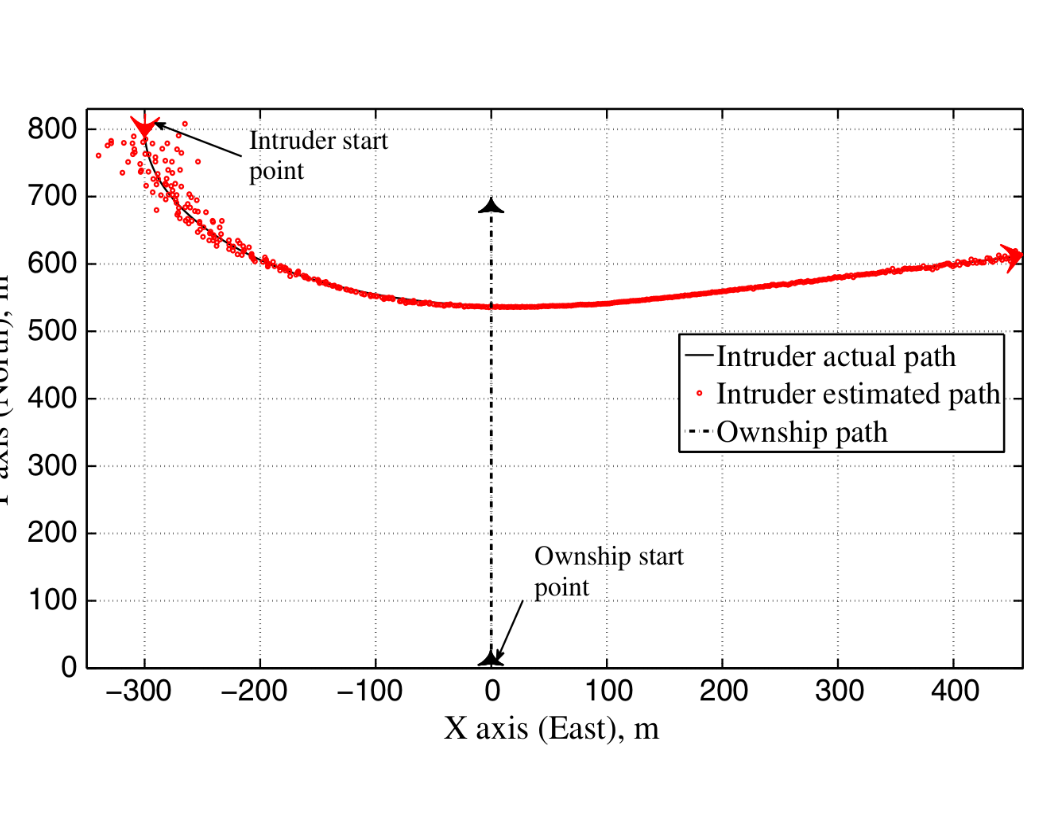
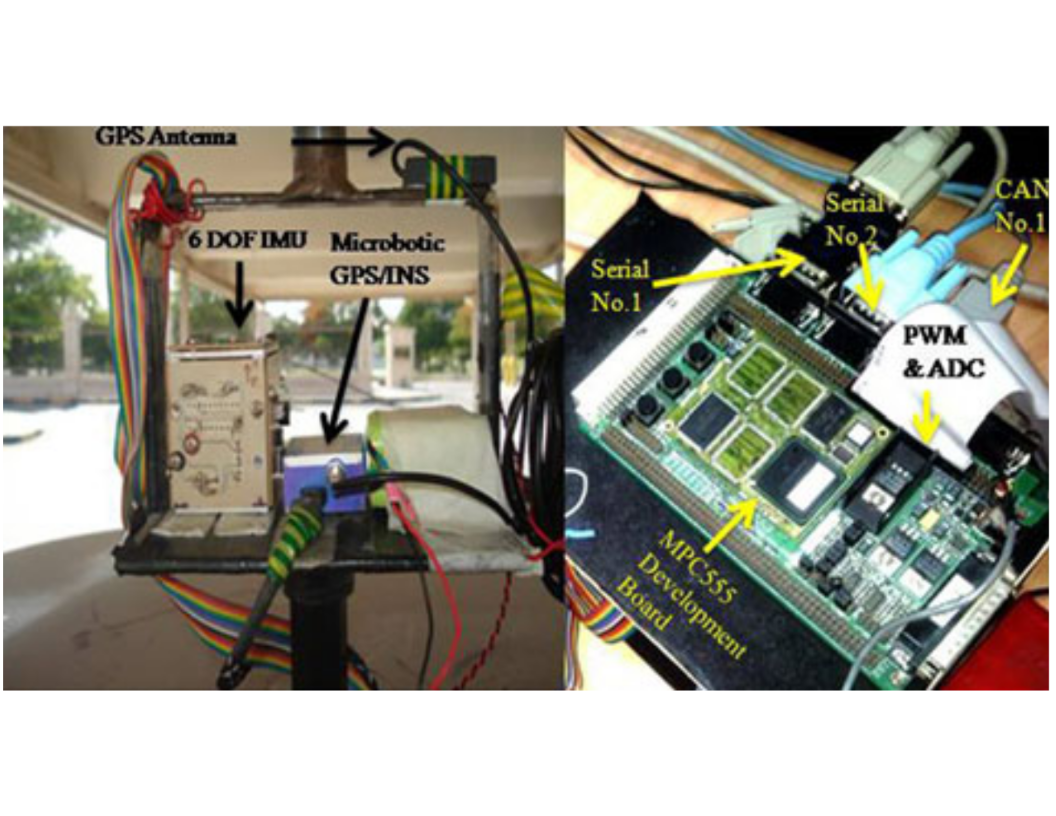
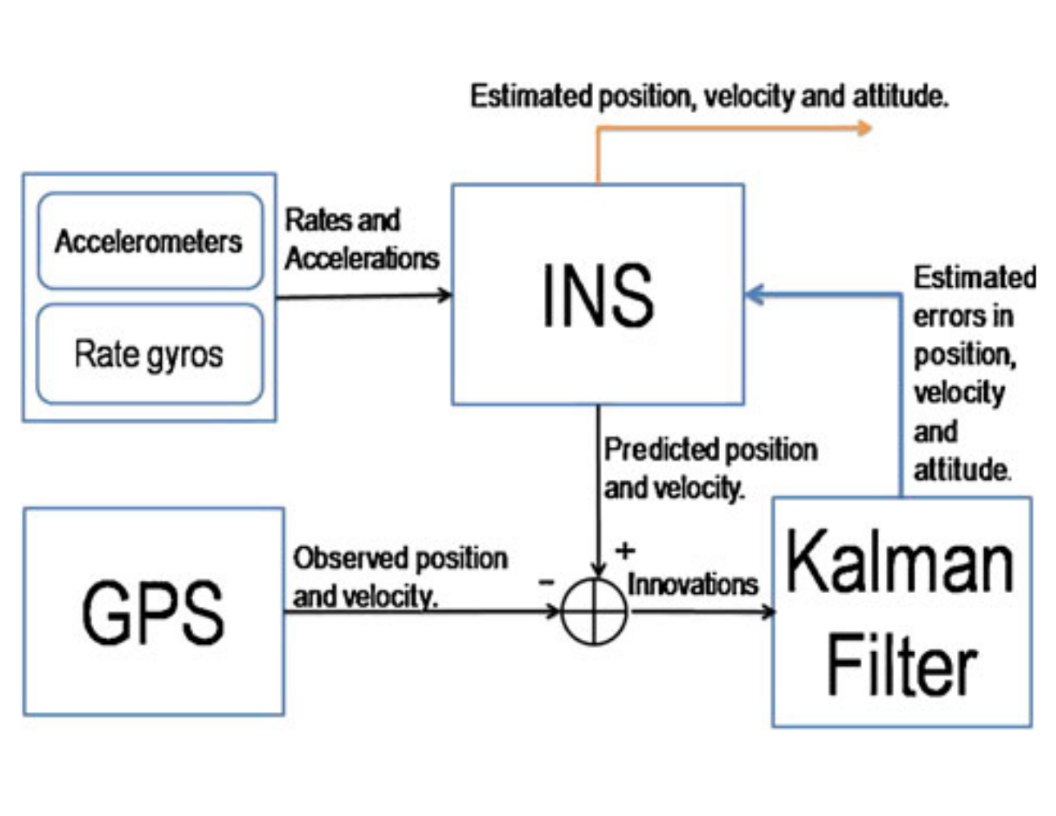
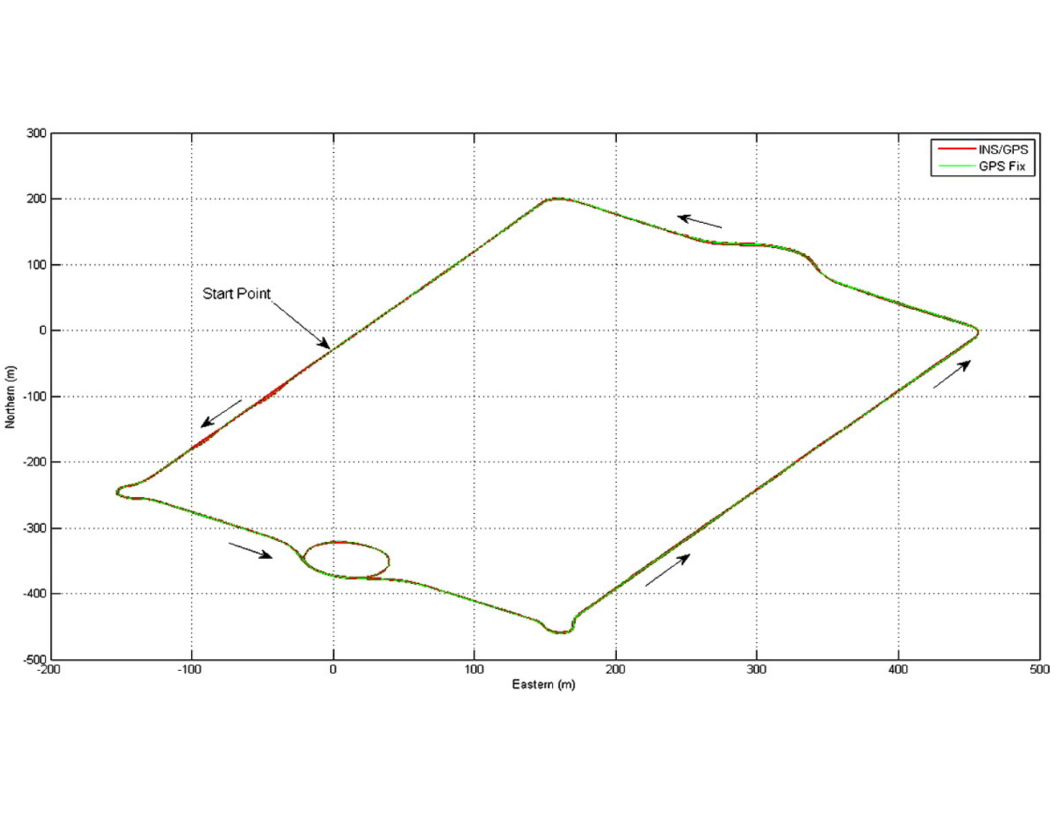
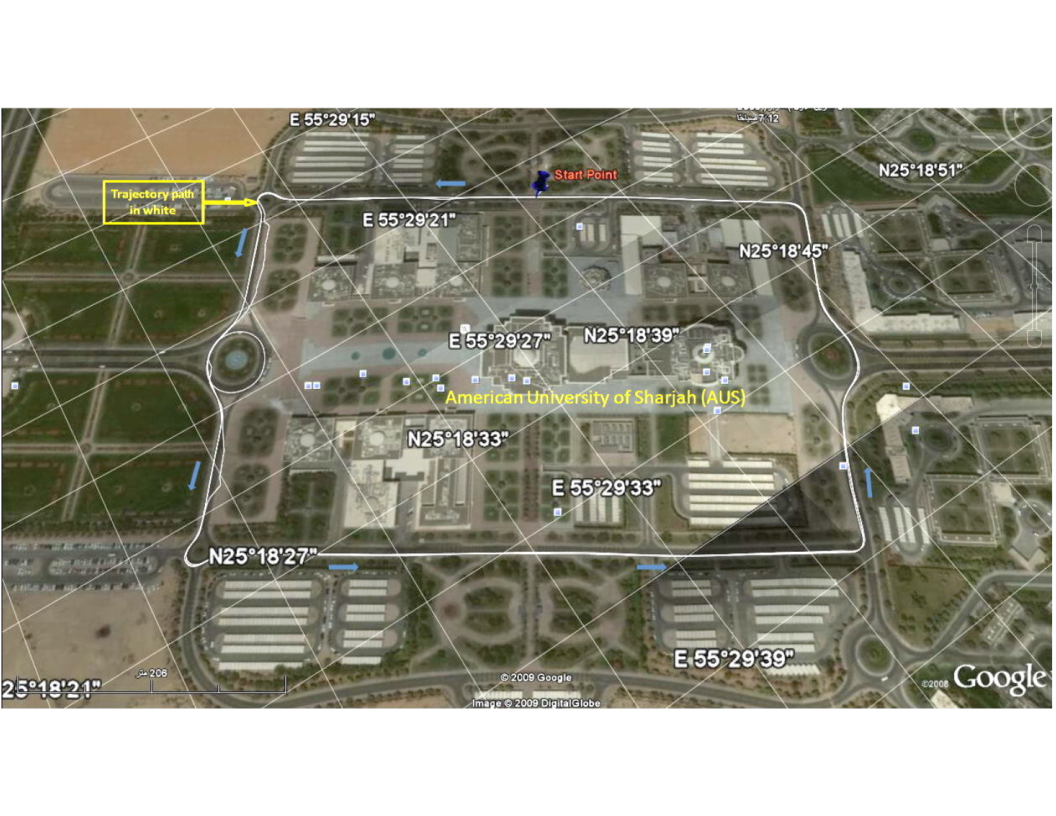
This work details the study, development, and experimental implementation of GPS aided strapdown inertial navigation system (INS) using commercial off-the-shelf low-cost inertial measurement unit (IMU). |
|
In this paper, a relative frame localization problem is addressed for pairs of vehicles with significant initial pose uncertainties. A relative frame Extended Kalman filter (EKF) is developed for the case where vehicles share odometry (body-frame delta position values), and are capable of getting inter-vehicle range measurements. |
|
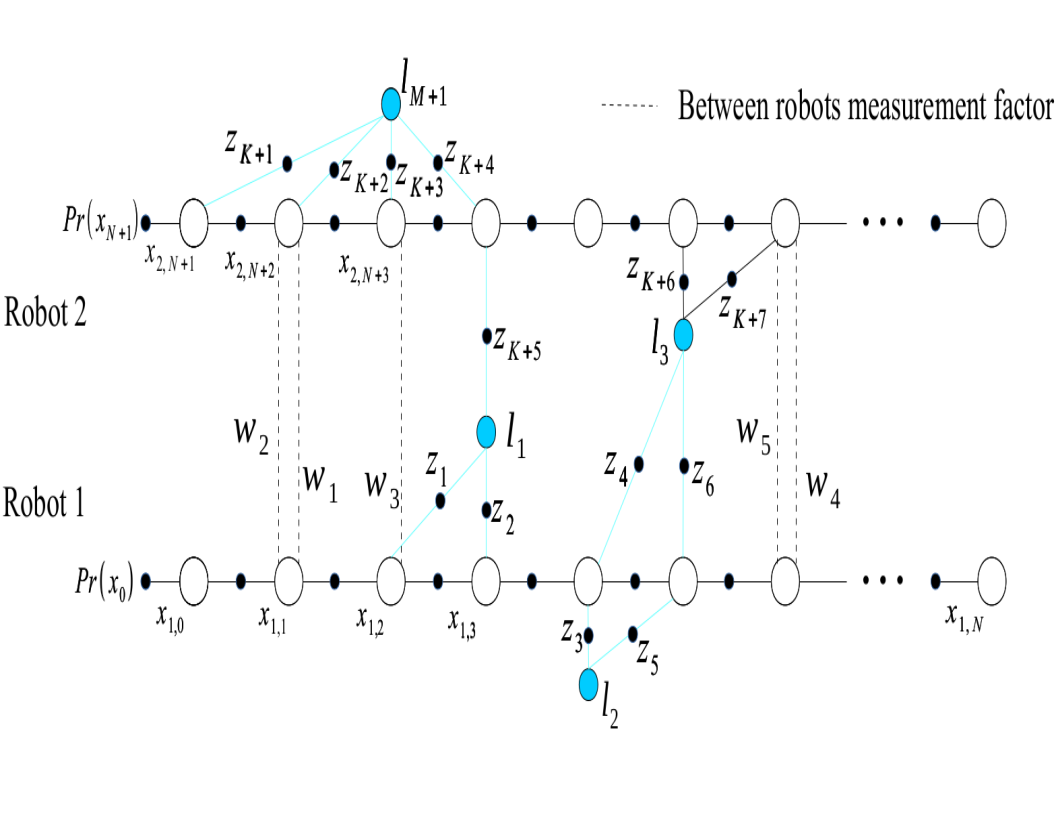
This work studies the performance of a decentralized cooperative localization using relative observations between robots and measurements to landmarks in the context of batch optimization of factor graphs. |
|
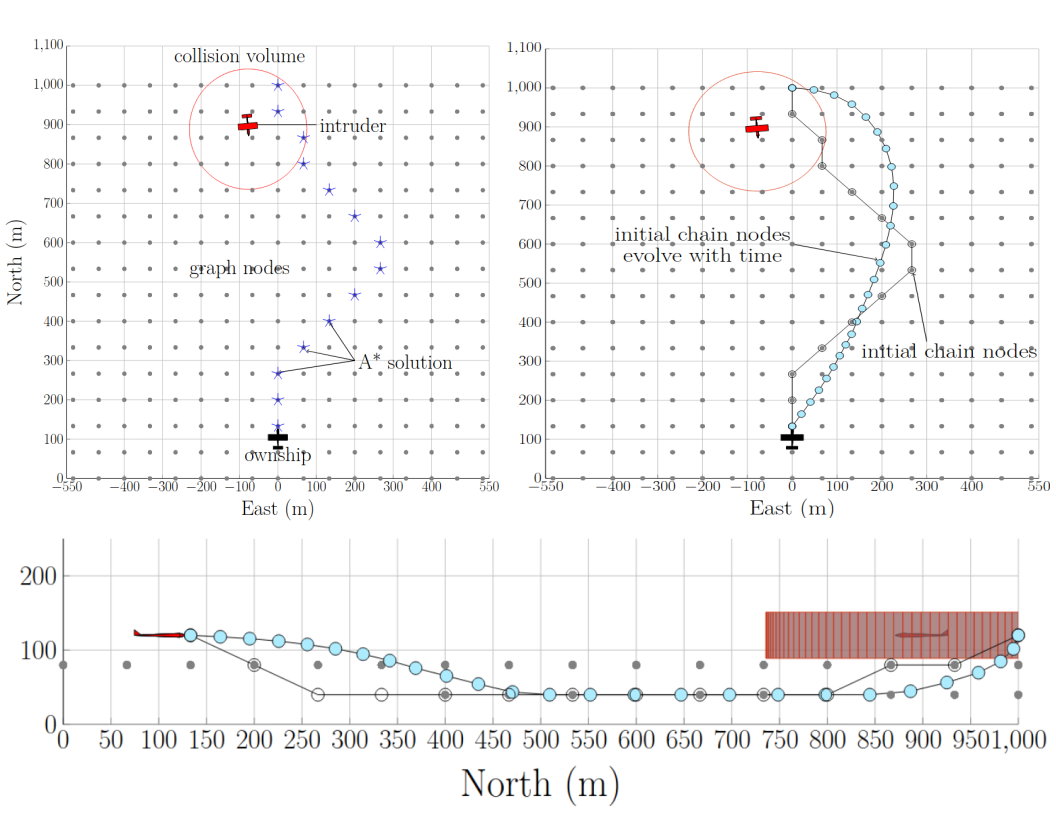
We proposed a two step path planning algorithm with collision detection logic for small UAS. The path planning approach taken in this work is carried out in two steps. In the first step, an initial suboptimal path is generated using A* search. In the second step, a chain of unit masses connected by springs and dampers evolves in a simulated force field, using the A* solution as an initial condition. A unique strength of this approach is the ability to use dynamic chain analogy to smooth path into a fiyable shape while mainlining a safe distance from intruders. |

|
This article describes the theoretical and implementation challenges associated with generating 3D odometry estimates (delta-pose) from RGBD sensor data in real-time to facilitate navigation in cluttered indoor environments. |
|
Based on realistic sensor models, maximum flight velocities of several different aircraft and a minimum safe distance of 500 ft, we determine that the minimum sensing distance for a UAV to be able to successfully detect, compute and execute a maneuver is 1.8km. |
|
In this paper, we develop an innovative approach to quantify likely intruder trajectories and estimate the probability of collision risk for a pair of aircraft flying at the same altitude in close proximity. The proposed approach is formulated in a probabilistic framework building upon the uncorrelated encounter model (UEM) developed by MIT Lincoln Laboratory (LL) and the concept of forward reachable sets. |
|
|
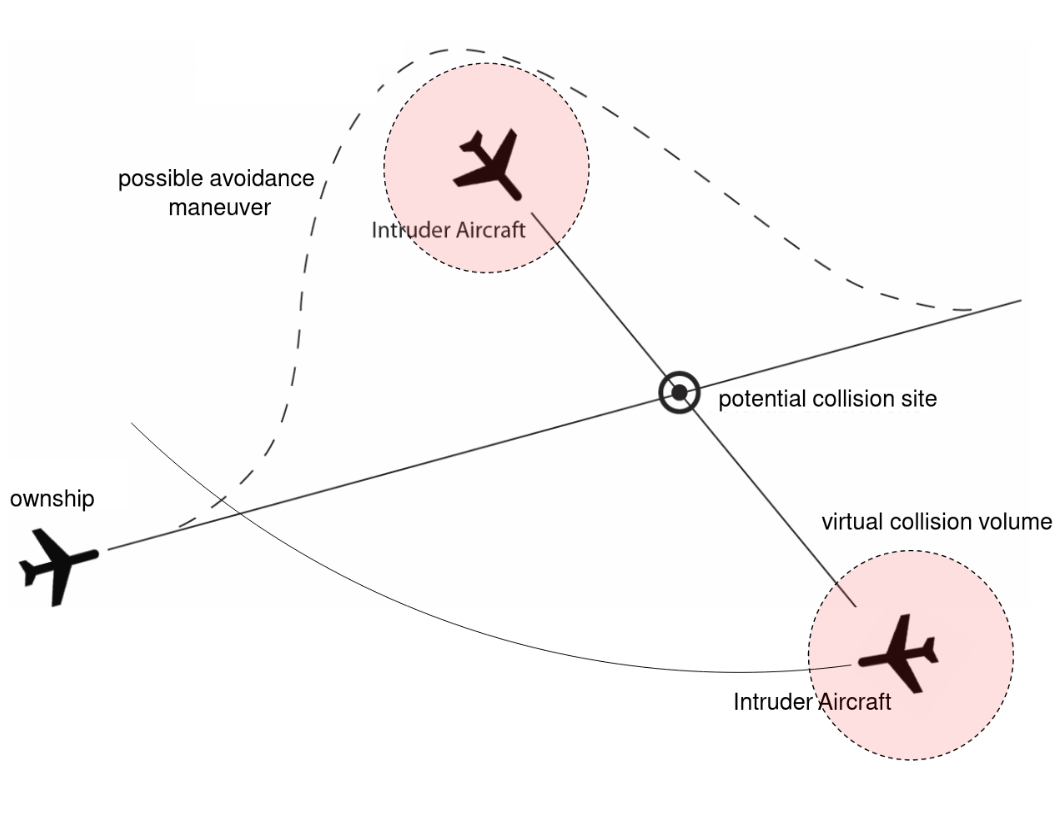
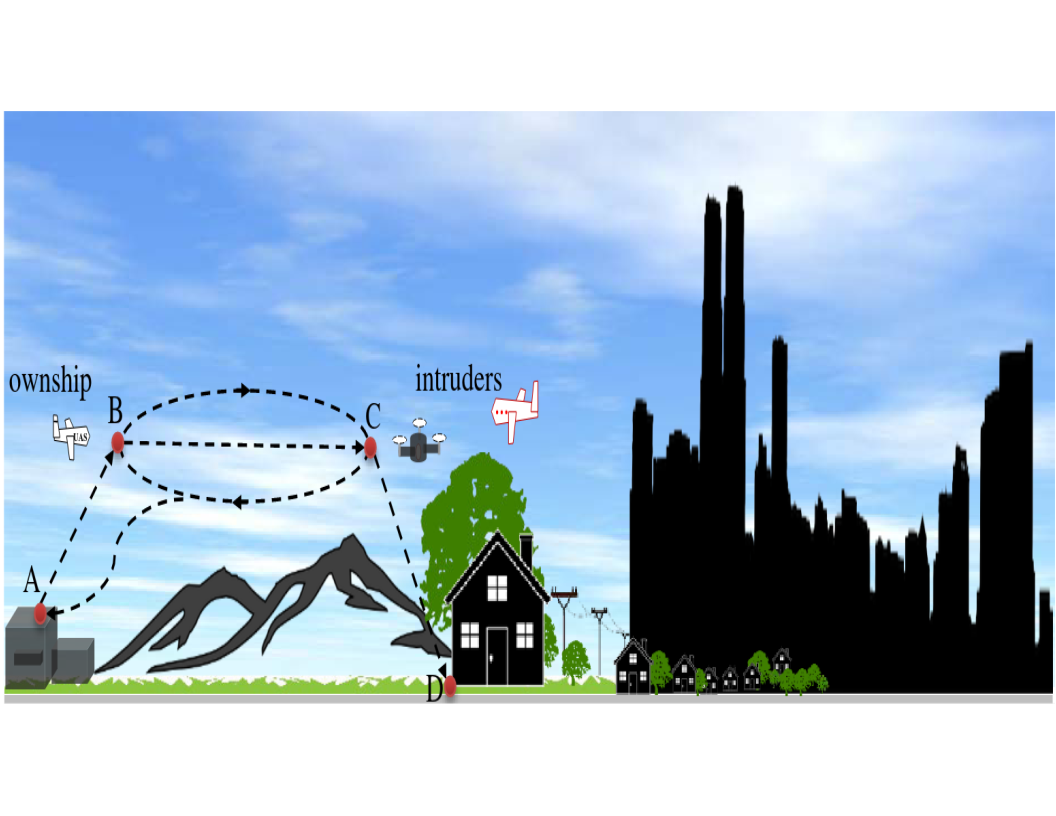
In this paper, we proposed a feasible collision avoidance based on a virtual chain placed in a virtual force field is proposed. The chain is described by a set of ordinary differential equations that is driven by virtual forces to find the steady-state equilibrium. We have also presented a method for detecting imminent collisions using passive monocular sensors based on UtopiaCompression’s unique technology M2PAR. Our preprint paper. Video 1, Video 2, Video 3. Video 4. |
|
|
My thesis describe the theoretical development and practical implementation in real-time of strapdown inertial navigation system (INS) using commercial of the shelf low cost inertial measurement unit (IMU) aided with the Global Positioning System (GPS). |

|
We proposed an affordable and reliable low-cost inertial measurement unit (IMU) is designed using commercial off-the-shelf (COTS) components.The proposed methodology requires no precise mechanical platform for the accelerometer while as simple rotating table is utilized for the rate-gyros calibration. |
|
|
|
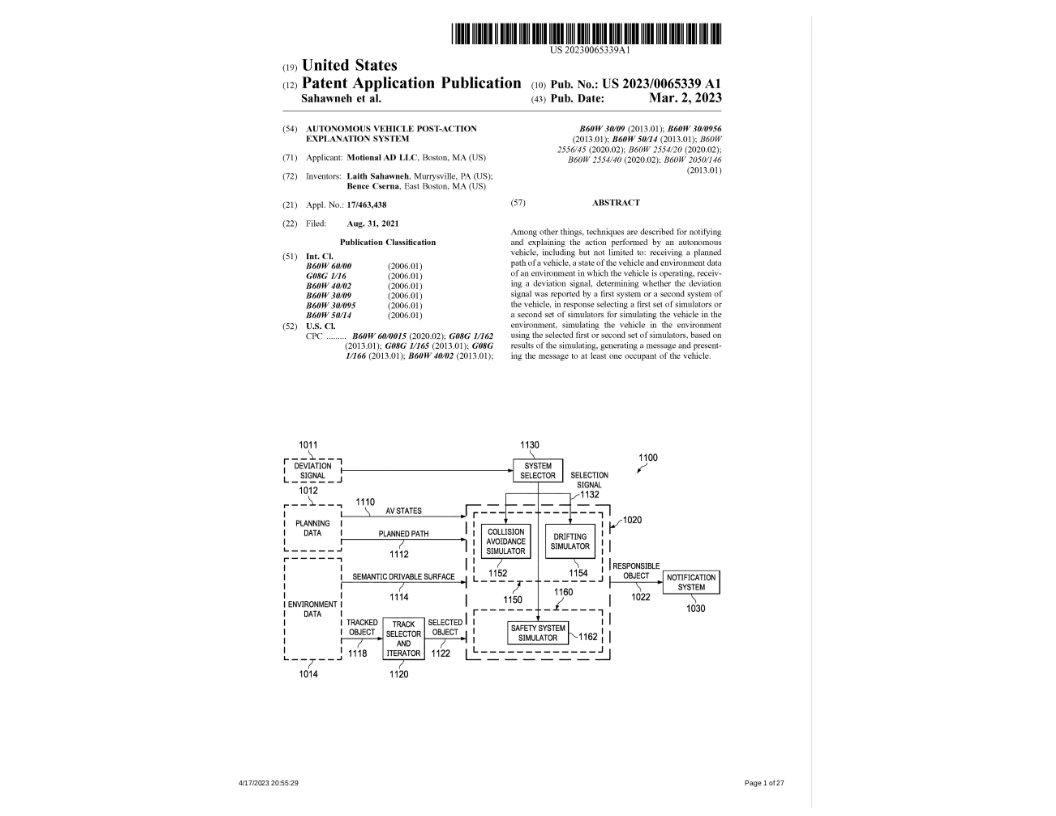
This patent is about notifying and explaining the action performed by an autonomous vehicle, including but not limited to changes in the planned path of a vehicle, a state of the vehicle and environment data of an environment in which the vehicle is operating. |
|
|
|
|
- Graduate Teaching Assistant, Feedback Control of Dynamic Systems (ECEn 483/ ME 431).
- Graduate Teaching Assistant, Mechatronics Design Lab (MTR 590). - Undergraduate Teaching Assistant, Theory of Semiconductors (EE 246). |
|
|
|

|
- Member of IEEE.
- IEEE-Eta Kappa Nu (IEEE-HKN). - Member of AIAA. - IEEE Aerospace and Electronics Society (AESS) - 30+ paper reviews (ACC, CDC, JAIS, JGCD, ICUAS) - Named an Excellent Reviewer for the Journal of Guidance, Control, and Dynamics twice for the years 2016 and 2017 |
|
|